


Câu hỏi vận dụngBài 1.Cảm biến siêu âm đo khoảng cách bằng cách ghi nhận khoảng thời gian t...
Câu hỏi:
Câu hỏi vận dụng
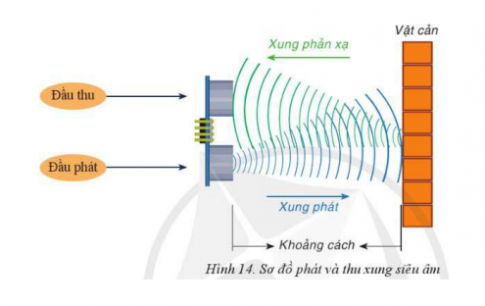
Bài 1. Cảm biến siêu âm đo khoảng cách bằng cách ghi nhận khoảng thời gian t (giây) từ lúc phát xung siêu âm đến lúc thu được xung phản xạ (Hình 14). Em hãy nêu công thức tính khoảng cách từ robot đến vật cản theo t. Biết rằng, xung siêu âm, xung phản xạ là sóng âm có tốc độ trong khoảng không khí là 340m/s. Coi khoảng cách từ robot đến vật cản xấp xỉ bằng quãng đường đi của xung phát hoặc xung phản xạ.
Câu trả lời:
Người trả lời: GV. Đỗ Đăng Hưng
Cách làm:1. Tính thời gian t (giây) mà âm thanh đi từ robot đến vật cản và quay trở lại: - Thời gian = t = 2 * khoảng cách / vận tốc âm thanh - Trong trường hợp này, vận tốc âm thanh là 340 m/s2. Chia thời gian t cho 29,412 để đổi sang đơn vị khoảng cách (microSeconds/cm).Câu trả lời: Khoảng cách từ robot đến vật cản được tính bằng công thức: Khoảng cách = vận tốc âm thanh * thời gian / 2 Khoảng cách = 340 * t / 2 Khoảng cách = 170 * tSau đó, để tính khoảng cách chính xác từ robot đến vật cản, chúng ta chia thời gian t cho 29,412: Khoảng cách (cm) = t / 29,412Vậy, khoảng cách từ robot đến vật cản là t / 29,412 (cm).
Câu hỏi liên quan:
- Khởi độngCâu hỏi.Em hãy nêu ứng dụng của robot trong giáo dục và đạo tạo.
- 1. Robot giáo dục2. Cấu tạo chung của robotHoạt động 1.Em hãy quan sát robot Arduino ở Hình 2...
- 3. Các bộ phận điện, điện tử của robotHoạt động 2.Bạn An muốn chế tạo một robot có khả năng...
- Luyện tậpCâu hỏi.Em hãy phân loại các bộ phận trong robot ở Hình 13 thành hai loại: phần cơ...
- Bài 2.Có một động cơ điện 1 chiều hoạt động ở điện áp trong khoảng 3V đến 9V. Cần sử dụng bao...
- Câu hỏi tự kiểm traCâu 1.Robot được cấu tạo từ những thành phần chính nào? Em hãy kể tên một...
- Câu 2.Cảm biến giúp thu nhận thông tin từ môi trường. Các bộ phận chấp hành như đèn, còi,...
Bình luận (0)